
DDPM-AFHQ: Implementing Denoising Diffusion Probabilistic Models on AFHQ Dataset
Date:
Generative Models, Diffusion Models, Computer Vision, U-Net Implementation
DDPM-AFHQ: End-to-End Diffusion Model Implementation
This project implements a full Denoising Diffusion Probabilistic Model (DDPM) using the AFHQ dataset (cats subset). The work follows the modern diffusion modeling pipeline, covering the forward process, reverse denoising process, cosine noise schedule, U-Net denoiser, training with L1 noise prediction loss, and visualization of both forward and backward diffusion. All training experiments—including FID logging, progressive sampling quality, and full 10k-step training—were completed on a A100 GPU.
Diffusion Forward & Reverse Processes
The forward process gradually adds Gaussian noise:
\(x_t = \sqrt{\bar{\alpha}_t} x_0 + \sqrt{1-\bar{\alpha}_t}\epsilon, \qquad \epsilon \sim \mathcal{N}(0,I)\) 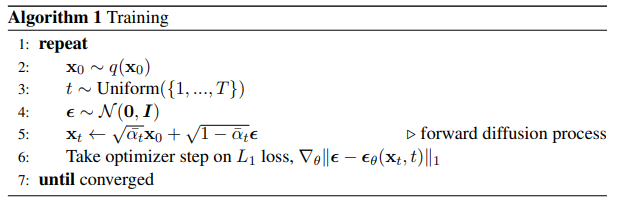
The reverse process uses the U-Net to predict $\epsilon_\theta(x_t,t)$ and reconstruct $x_0$ through the posterior mean:
\(\tilde{\mu}_t = \frac{\sqrt{\alpha_t}(1-\bar{\alpha}_{t-1})}{1-\bar{\alpha}_t} x_t + \frac{\sqrt{\bar{\alpha}_{t-1}}(1-\alpha_t)}{1-\bar{\alpha}_t} \hat{x}_0\) 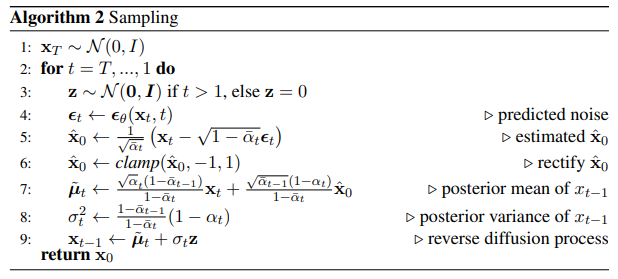
Forward Diffusion (PDF Figure)
 Figure 1: Forward diffusion process (noise increases gradually)
Figure 1: Forward diffusion process (noise increases gradually)
Reverse Diffusion (PDF Figure)
 Figure 2: Reverse diffusion process (model reconstructs from noise)
Figure 2: Reverse diffusion process (model reconstructs from noise)
U-Net Noise Predictor
A lightweight U-Net was implemented with:
- Downsampling/upsampling blocks
- Skip connections
- GroupNorm + SiLU
- Time embedding injected into each residual block
- Middle-layer attention at low resolution
This network predicts the added noise $\epsilon_\theta(x_t,t)$, enabling reconstruction of $x_0$.
U-Net Diagram (PDF Figure)
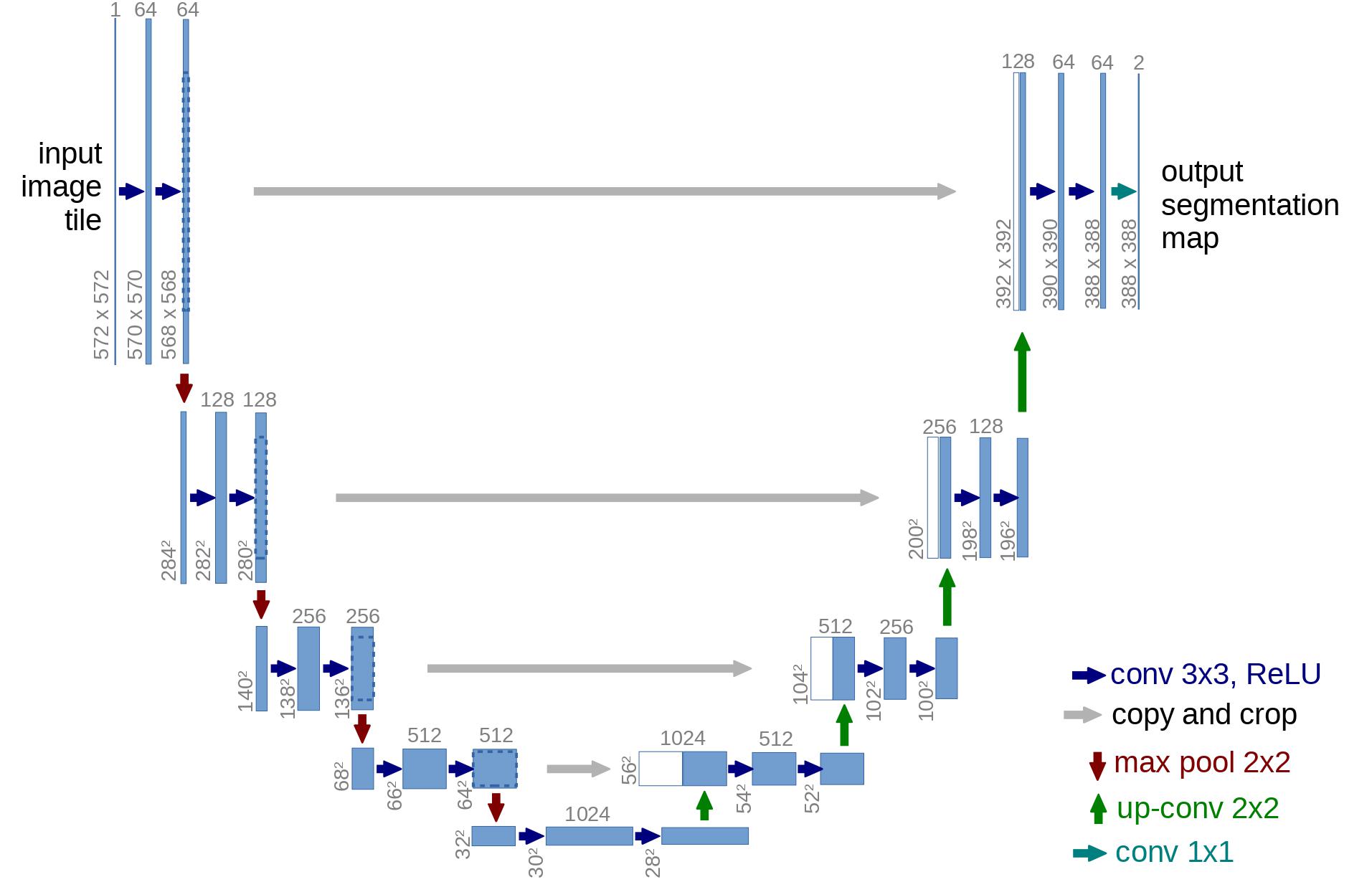 Figure 3: U-Net architecture
Figure 3: U-Net architecture
Training Pipeline & Configuration
Objective:
\(\mathcal{L} = \| \epsilon - \epsilon_\theta(x_t,t) \|_1\)
Setup:
- Dataset: AFHQ (cats)
- Timesteps: T = 50
- Optimizer: AdamW (1e-3)
- Batch size: 32
- Cosine noise schedule (Nichol & Dhariwal 2021)
- Hardware: Google Colab A100
Training Loss Curve (PDF Figure)
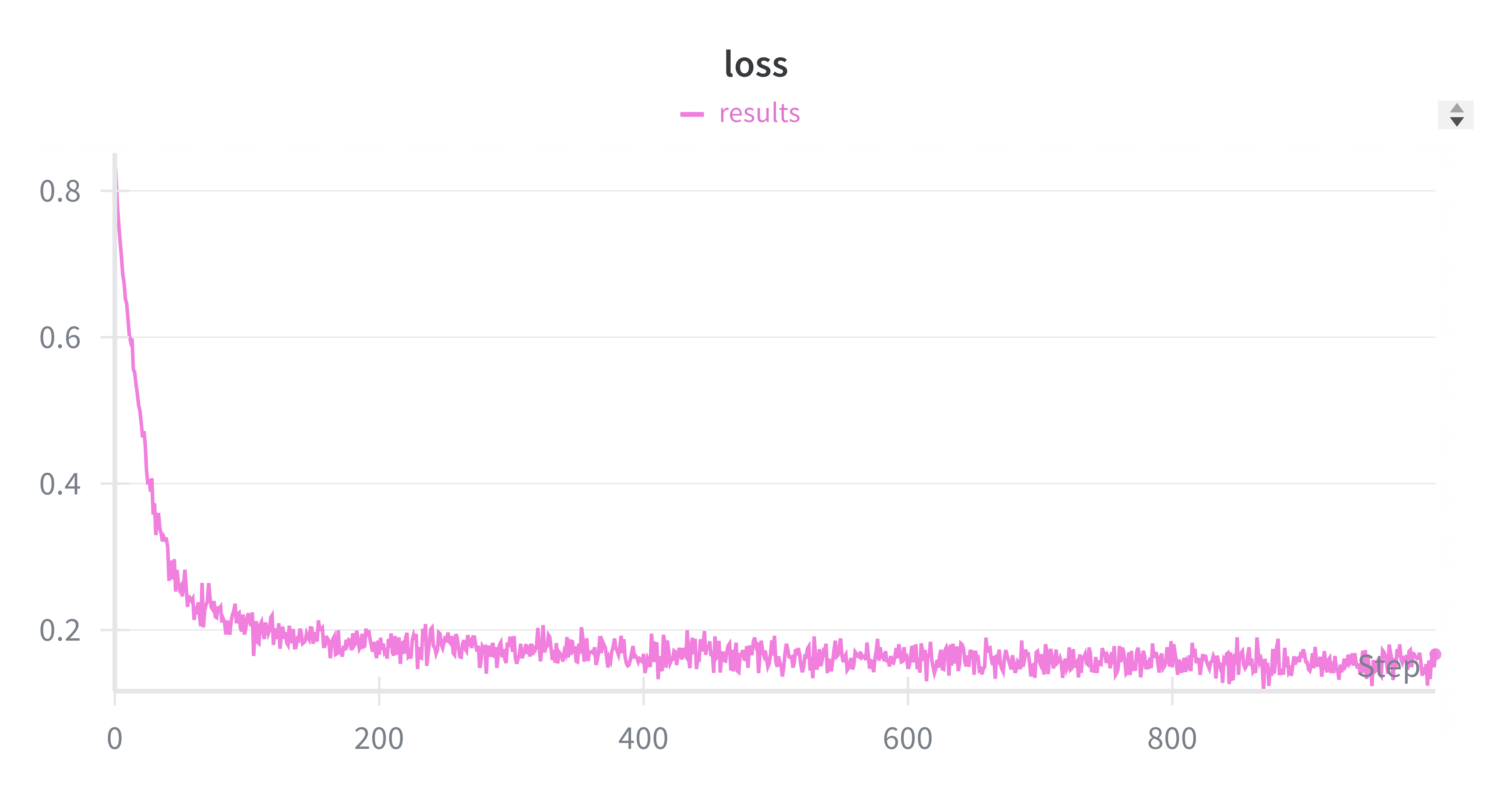 Figure 4: Training loss curve
Figure 4: Training loss curve
FID Tracking (PDF Figure)
 Figure 5: FID progression over training steps
Figure 5: FID progression over training steps
My Role & Contributions
As the sole developer, I:
- Implemented the full forward diffusion process
- Implemented reverse process sampling (
p_sample,p_sample_loop,sample) - Built the U-Net noise prediction model
- Engineered full training pipeline and L1 noise prediction loss
- Logged FID and produced visualizations (forward, backward, final samples)
- Completed full 10k-step training and evaluation
- Extracted and documented all results shown above
This project refined my understanding of variational inference, generative modeling, and the finer dynamics of diffusion processes.