
About Me
Hi there! 你好呀! こんにちは!
I’m Kanlong Ye, a Master’s student in Mechanical Engineering (Robotics Track) at Carnegie Mellon University, specializing in Robotics and AI. With a strong foundation in machine learning, deep learning, and generative AI, I am passionate about advancing intelligent robotic systems that can navigate and understand the physical world.
Research & Interests
At CMU, my research lies at the intersection of machine learning and robotics. I work in the Computational Engineering & Robotics Lab (CERLAB) under Professor Kenji Shimada, where I focus on:
- LiDAR-based UAV inspection in complex indoor environments (tunnels, bridges)
- Wind-aware autonomous control using reinforcement learning (Transformer-PPO)
- Real-world SLAM and trajectory planning on diverse robotic platforms
I’ve built full UAV autonomy stacks from the ground up—both in simulation (Gazebo, Isaac Sim) and on physical platforms—integrating perception, planning, and control for robust autonomous navigation.
Recent Highlights
December 2024: Successfully completed autonomous tunnel inspection demonstration for TOPRISE CO., LTD in Fukushima, Japan. Our team deployed a custom LiDAR-equipped UAV system for real-world infrastructure inspection, achieving high-resolution 3D reconstruction (accuracy < 5cm).

On-site tunnel inspection in Fukushima, Japan
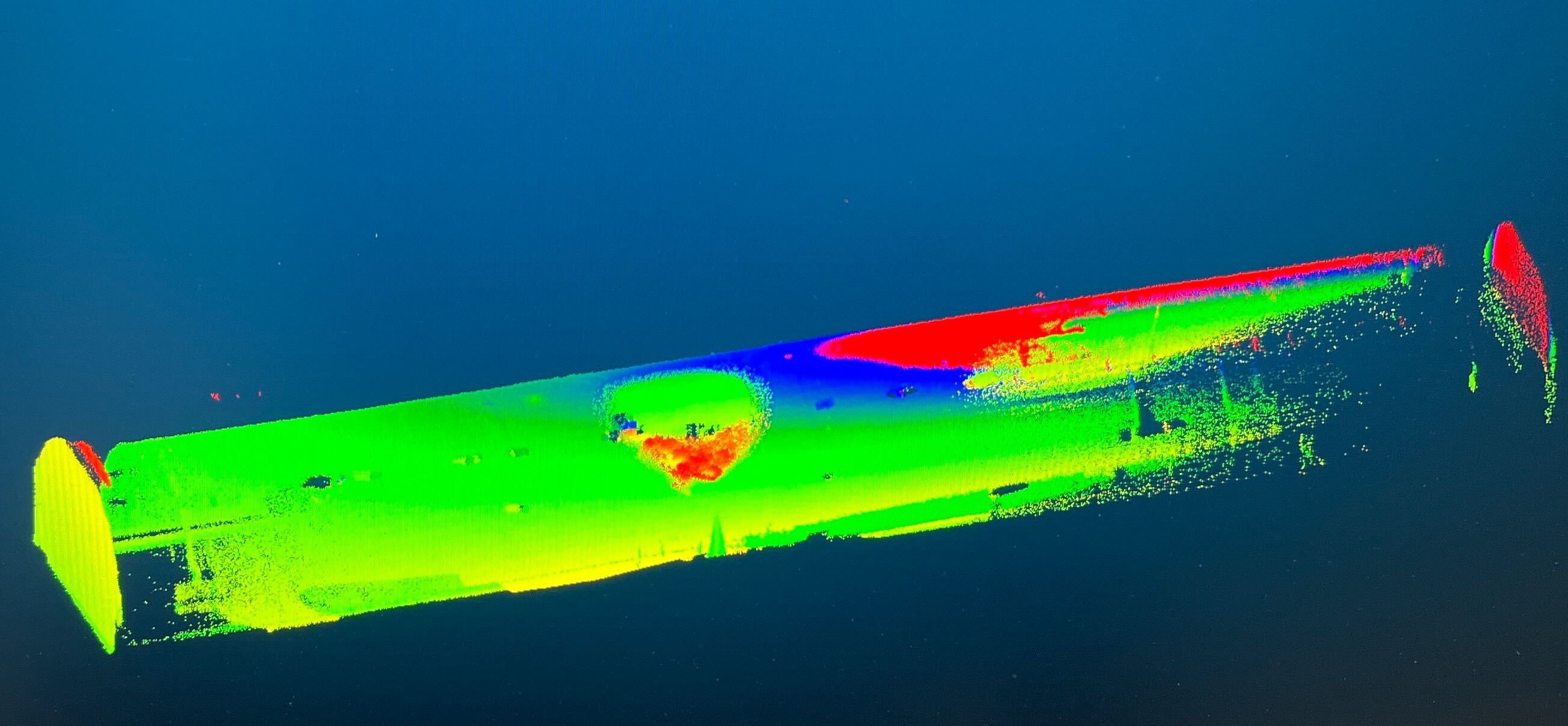
Point cloud reconstruction from LiDAR data
June 2025: Delivered production UAV system to TOPRISE CO., LTD, marking the transition from research prototype to commercial deployment. Our work was featured on Japanese national television, showcasing the impact of autonomous inspection technology.
 production UAV system
production UAV system
Featured on Japanese national television
📺 Watch full coverage on YouTube
Background & Experience
I received my B.Eng in Mechanical Design & Manufacturing and Their Automation (Japanese Intensive) from Dalian University of Technology in 2024, where I gained extensive hands-on experience in robotics:
- Programming robotic arms for manipulation tasks
- Designing and fabricating mechanical systems and MEMS devices
- Developing computer vision algorithms for underwater robot navigation
- MEMS research at Tohoku University (2023)
Technical Skills & Languages
I thrive in interdisciplinary environments where AI meets physical systems.
Technical: Python, C++, ROS/ROS2, PyTorch, Gazebo, Isaac Sim, MATLAB, Git
Languages: Chinese (Native), English (Fluent), Japanese (Fluent)
I bring both technical versatility and a global perspective to collaborative robotics projects.
Looking Forward
I’m currently seeking research or industry opportunities in robotics, autonomous systems, and machine learning. Let’s connect if you’re working on building smarter, more capable robots—or simply share an interest in drones, machine learning, or reinforcement learning!
Check out my CV here.
